TEMES 1.0
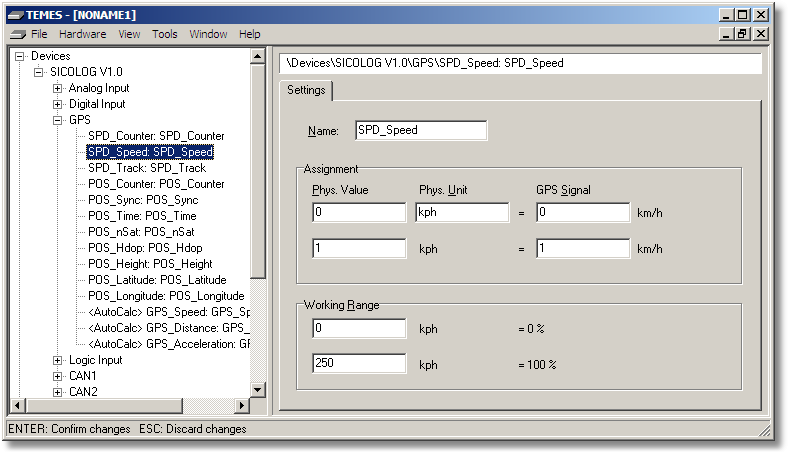
Figure 2-25: Parameter tree node GPS signal.
Name: Unique name of the input signal. If this field is empty the corresponding input signal is deactivated.
Assignment: Definition of the linear relationship. See also Analog Input, Settings tab.
Working Range: Definition of the nominal physical signal range. These values will only be used as default values for chart axes, and as default values for output assignments.
The following SICOLOG/SICO3/USBDL1 signals increase the computational complexity (if used):
Signal |
Description |
GpsSpeed |
GPS speed with a minimal speed value and with limited acceleration (which is 2 g by default). This value requires also a minimal amount of visible satellites and a maximal value of HDOP. |
GpsSpeedInt |
Linear interpolated values of the GpsSpeed signal. The signal is delayed by the fix GPS refresh rate. |
GpsTrack |
GPS track signal with a minimal amount of visible satellites and a maximal value of HDOP and a required minimum speed. |
GpsTrackEx |
Extended angle of GpsTrack. This value corrects the modulo 360° operation of GpsTrack. |
GpsAcc |
Longitudinal acceleration |
GpsAccInt |
Linear interpolated values of the GpsAcc signal. The signal is delayed by the fix GPS refresh rate. |
GpsTAcc |
Transversal acceleration |
GpsTAccInt |
Linear interpolated values of the GpsTAcc signal. The signal is delayed by the fix GPS refresh rate. |
GpsTotalAcc |
Square root of (GpsAcc² + GpsTAcc²) |
GpsLeanAngle |
Theoretical lean angle of a motorbike. This value is extracted from the signal GpsTAcc: GpsLeanAngle = arctan(GpsTAcc / g) = arctan(GpsTAcc / 9.81 m/s²), and is valid for |GpsTAcc| ≤ 5 g. |
GpsLeanAngleInt |
Linear interpolated values of the GpsLeanAngle signal. The signal is delayed by the fix GPS refresh rate. |
GpsAbsLeanAngle |
Theoretical magnitude of the lean angle of a motorbike. This value is extracted from the signal GpsTAcc: GpsAbsLeanAngle = |arctan(GpsTAcc / g)| = |arctan(GpsTAcc / 9.81 m/s²)|, and is valid for |GpsTAcc| ≤ 2 g. |
GpsAbsLeanAngleInt |
Linear interpolated values of the GpsAbsLeanAngle signal. The signal is delayed by the fix GPS refresh rate. |
GpsRadius |
Curve radius |
GpsTrackDiff |
Track difference |
GpsAngularSpeed |
Angular speed (of the track) |
GpsDistance |
Integration of the GpsSpeed value |
GpsDistanceInt |
Linear interpolated values of the GpsDistance signal. The signal is delayed by the fix GPS refresh rate. |
GpsSlope |
Distance slope |
GpsLatitude |
GPS latitude with a minimal number of visible satellites and with a maximal value of HDOP. |
GpsLongitude |
GPS longitude with a minimal number of visible satellites and with a maximal value of HDOP. |
The following signals were introduced in the corresponding firmware:
GpsLeanAngle |
SICOLOG/SICO3/USBDL1 firmware V1.0.33 |
GpsLeanAngleInt |
SICOLOG/SICO3/USBDL1 firmware V1.0.33 |
GpsAbsLeanAngleInt |
SICOLOG/SICO3/USBDL1 firmware V1.0.32 |
All other Gps... signals |
SICOLOG/SICO3/USBDL1 firmware V1.0.31 |